Model- and Acceleration-based Pursuit (MAP) Controller for High-Performance Autonomous Racing
May 2, 2023
Jonathan Becker
MAP Paper
A big reason for the teams outstanding performance at the F1TENTH Grand Prix is our Path tracking controller. Developed by thesis students for our first Race at ICRA 2022, the Model- and Acceleration-based Pursuit controller allows us to track our racing line at speeds close to the limit of friction. The paper was published and presented at the International Conference on Robotics and Automation 2023 in London.
Abstract
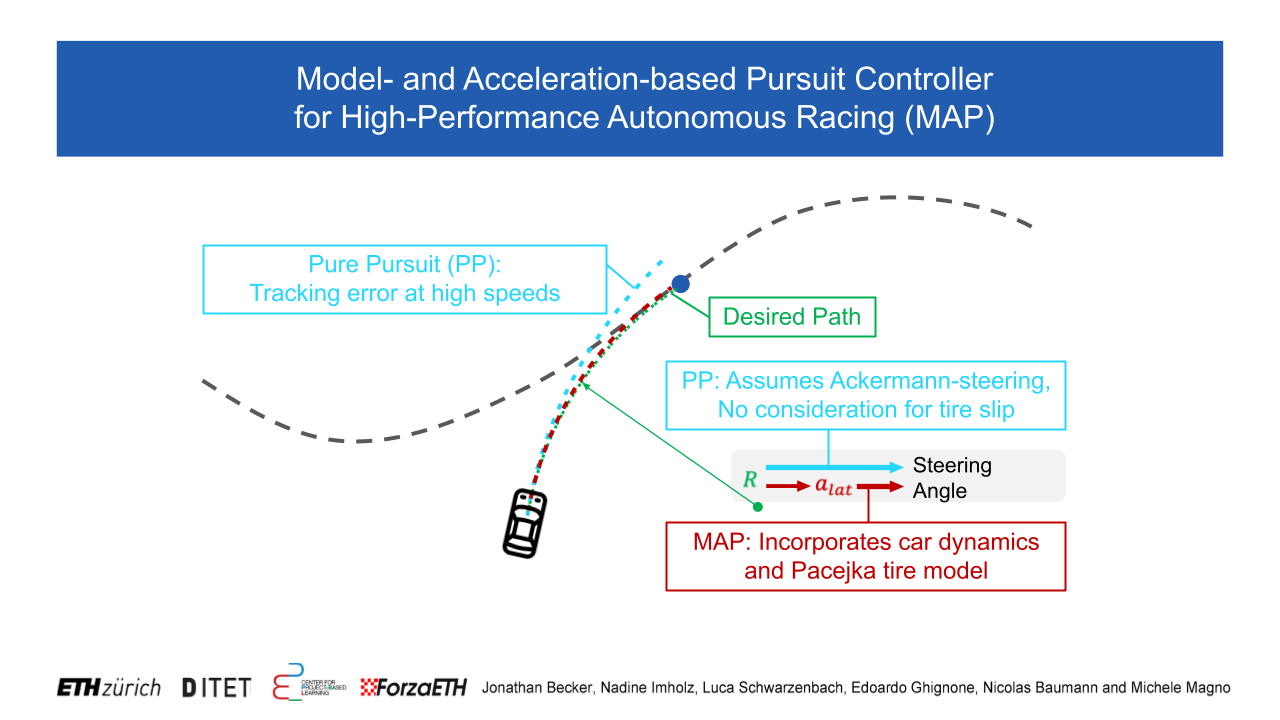
Autonomous racing is a research field gaining large popularity, as it pushes autonomous driving algorithms to their limits and serves as a catalyst for general autonomous driving. For scaled autonomous racing platforms, the computational constraint and complexity often limit the use of Model Predictive Control (MPC). As a consequence, geometric controllers are the most frequently deployed controllers. They prove to be performant while yielding implementation and operational simplicity. Yet, they inherently lack the incorporation of model dynamics, thus limiting the race car to a velocity domain where tire slip can be neglected. This paper presents Model- and Acceleration-based Pursuit (MAP) a high-performance model-based trajectory tracking algorithm that preserves the simplicity of geometric approaches while leveraging tire dynamics. The proposed algorithm allows accurate tracking of a trajectory at unprecedented velocities compared to State-of-the-Art (SotA) geometric controllers. The MAP controller is experimentally validated and outperforms the reference geometric controller four-fold in terms of lateral tracking error, yielding a tracking error of 0.055m at tested speeds up to 11m/s.
Video
Authors
Jonathan Becker, Nadine Imholz, Luca Schwarzenbach, Edoardo Ghignone, Nicolas Baumann, Michele Magno